



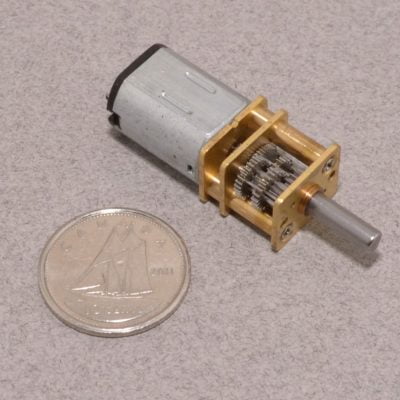
TT Motor Gearbox – 1:48 Gear Ratio
$2.95
Availability:
In Stock
This “TT” Gearmotor is a compete DC motor and 1:48 Gearbox in one convenient, easy to mount package!
Available
Description
Using a basic DC motor to drive a wheel on a robot can be a bit tricky. Small DC motors tend to have a very high shaft speed, very low torque, and no easy way to connect to a wheel. These all in one “TT” Gearbox Motors take care of everything!
The DC motor is coupled to a 1:48 reduction gearbox in an easy to mount assembly. On each side of the gearbox there is a 5.5mm flatted output shaft – these can be used to connect wheels and rotary encoders. The “no load” output shaft speed is approximately 120 RPM at 3V and 250 RPM at 6V. This is the fastest version of the TT motor we carry – ideal for a small roaming robot!
These motors cannot be directly driven by an Arduino, Raspberry Pi, micro:bit, or other similar microcontroller or single board computer. A motor driver will need to be used.
Please Note: Wheel and Encoder Disk sold separately.
Features
- Rated Voltage: 3-6VDC
- Current Draw: ~150mA
- Gearbox Ratio: 1:220
- Torque: ~ 0.15kg.cm - 0.6kg.cm
- Body Dimensions: 70 x 19 x 22.5mm
- Weight: 30g
- Maximum Voltage: ~8VDC
- Stall Current: ~1.0 - 1.5A
- Output Shaft RPM: ~26 to 54 RPM
- Shaft Dimensions: 5.5mm flatted
- Stall Torque: 0.8kg.cm @ 6VDC
Package Contents
- 1 x TT Motor Gearbox - 1:48 Gear Ratio
May We Also Suggest…
Warranty Policy
This product has a 30 Day Warranty from the date of delivery. The item must not be modified, abused, incorrectly hooked up, or used for purposes outside the original scope of design.
Return Policy
This product is returnable Within 14 Days of delivery for a store credit. Item must be unopened, unused, and in re-saleable condition.






James Craig –
Wish they made a bracket or motor mount for these